
















Robotic Welding Automation
By: Casarini Robotica
 Italy
Italy
The CASARINI ROBOTICA puts in its profound experience in designing, manufacturing, and supplying sensor-controlled welding and cutting robot systems. These are specialized welding robots designed to multitask in welding, cutting, beveling, and more.The CASARINI welding robots are mainly used in the welding & cutting industry and fabrication ind...
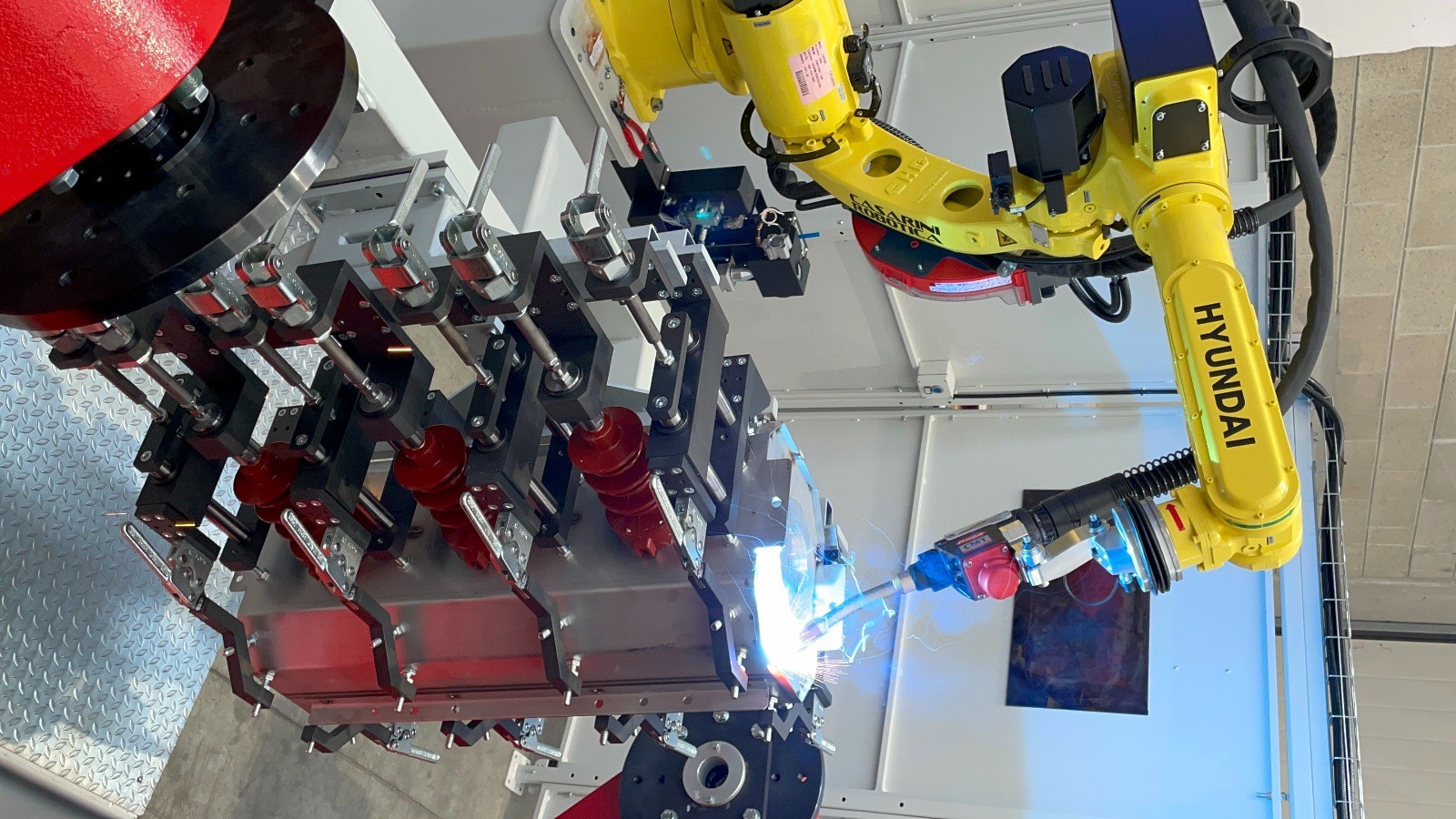
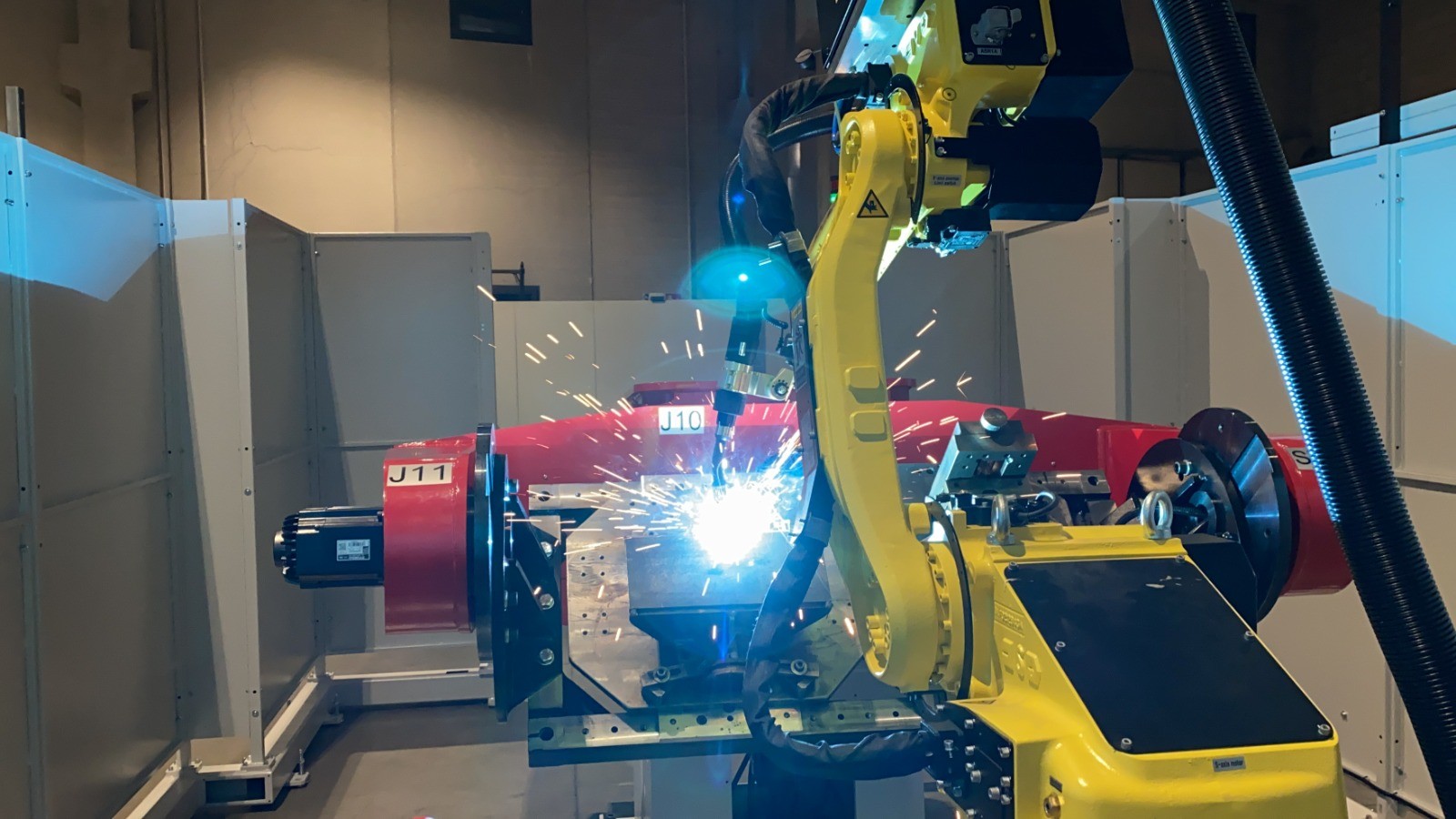
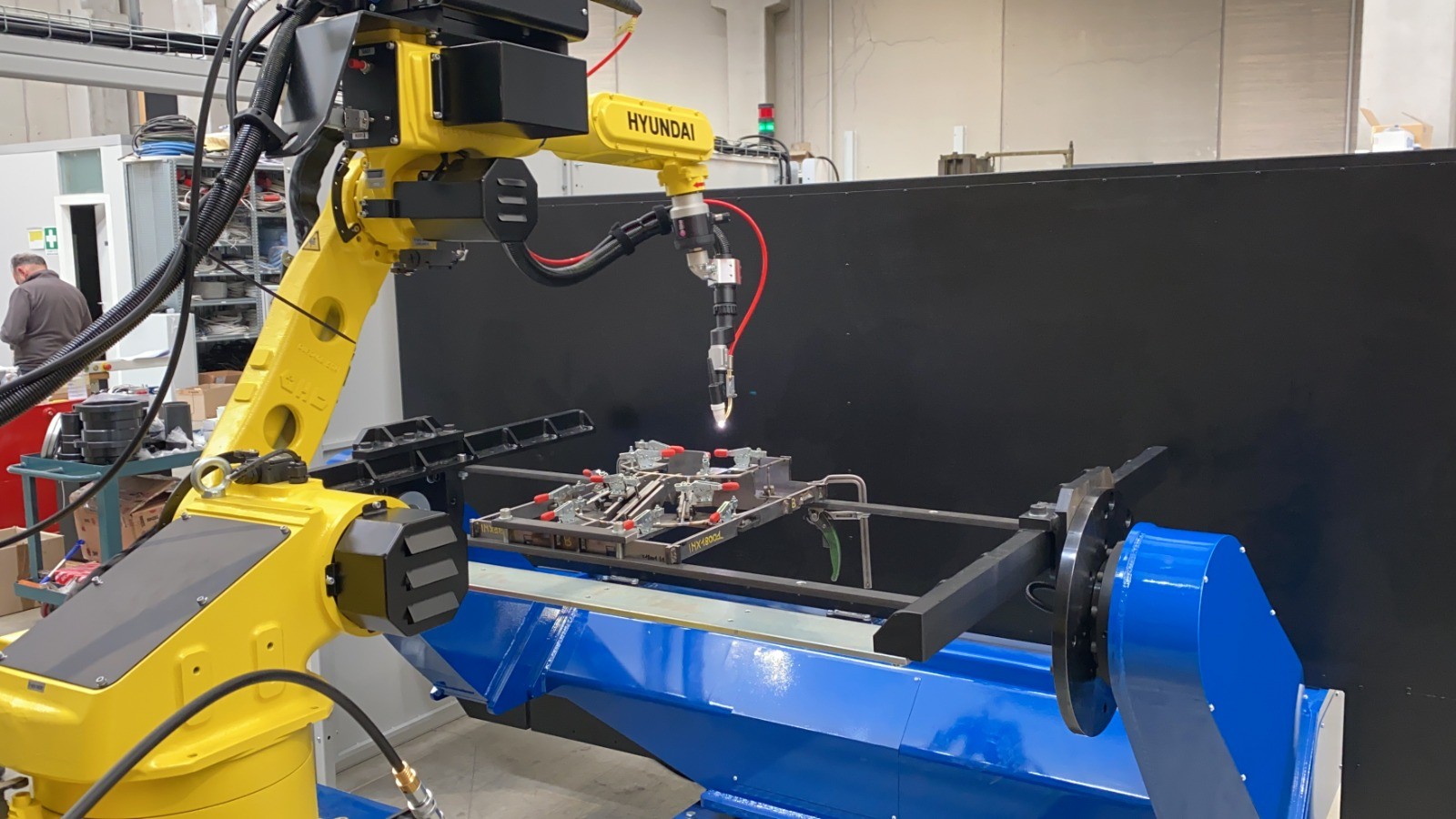
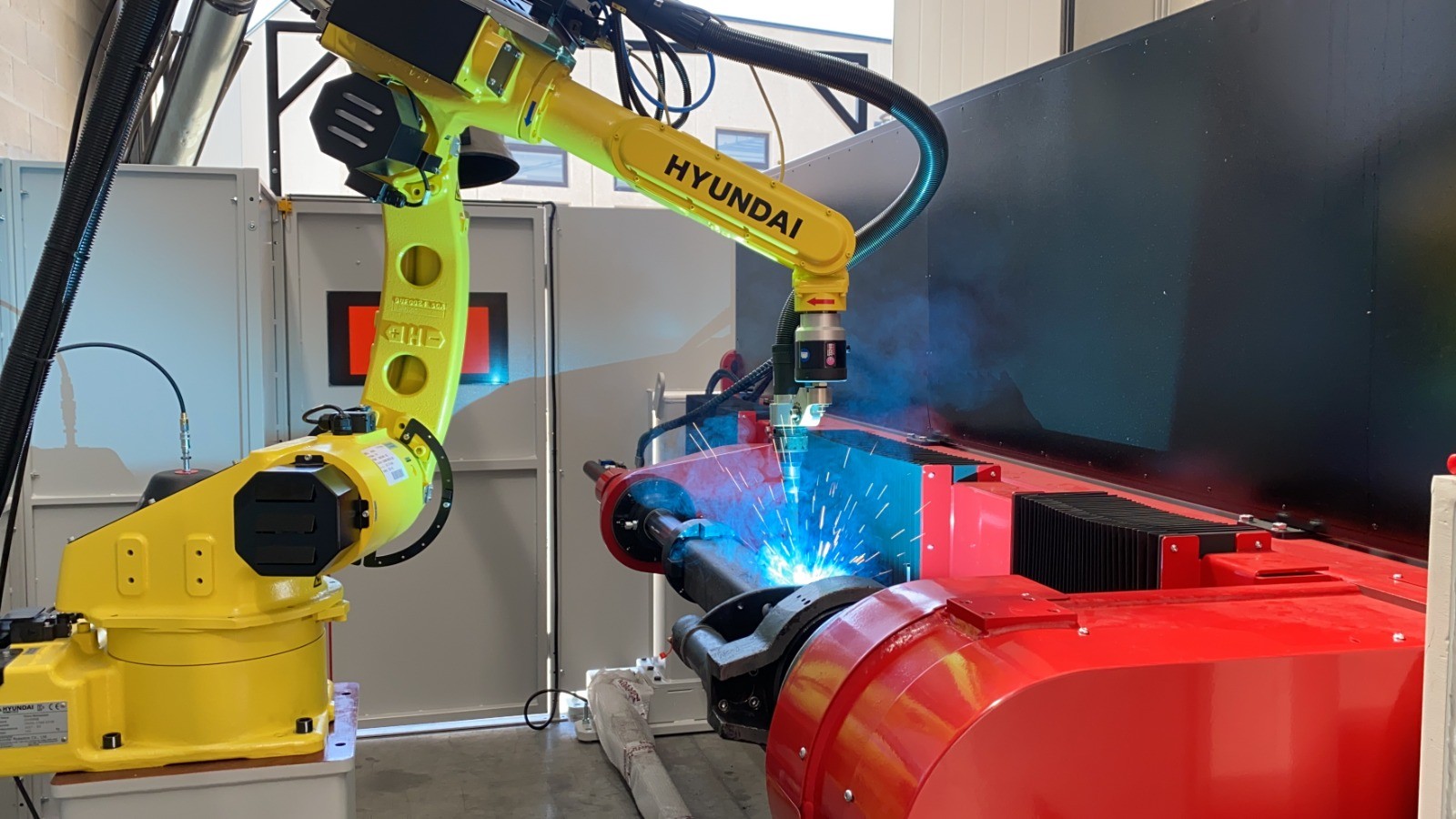
The CASARINI ROBOTICA puts in its profound experience in designing, manufacturing, and supplying sensor-controlled welding and cutting robot systems. These are specialized welding robots designed to multitask in welding, cutting, beveling, and more.
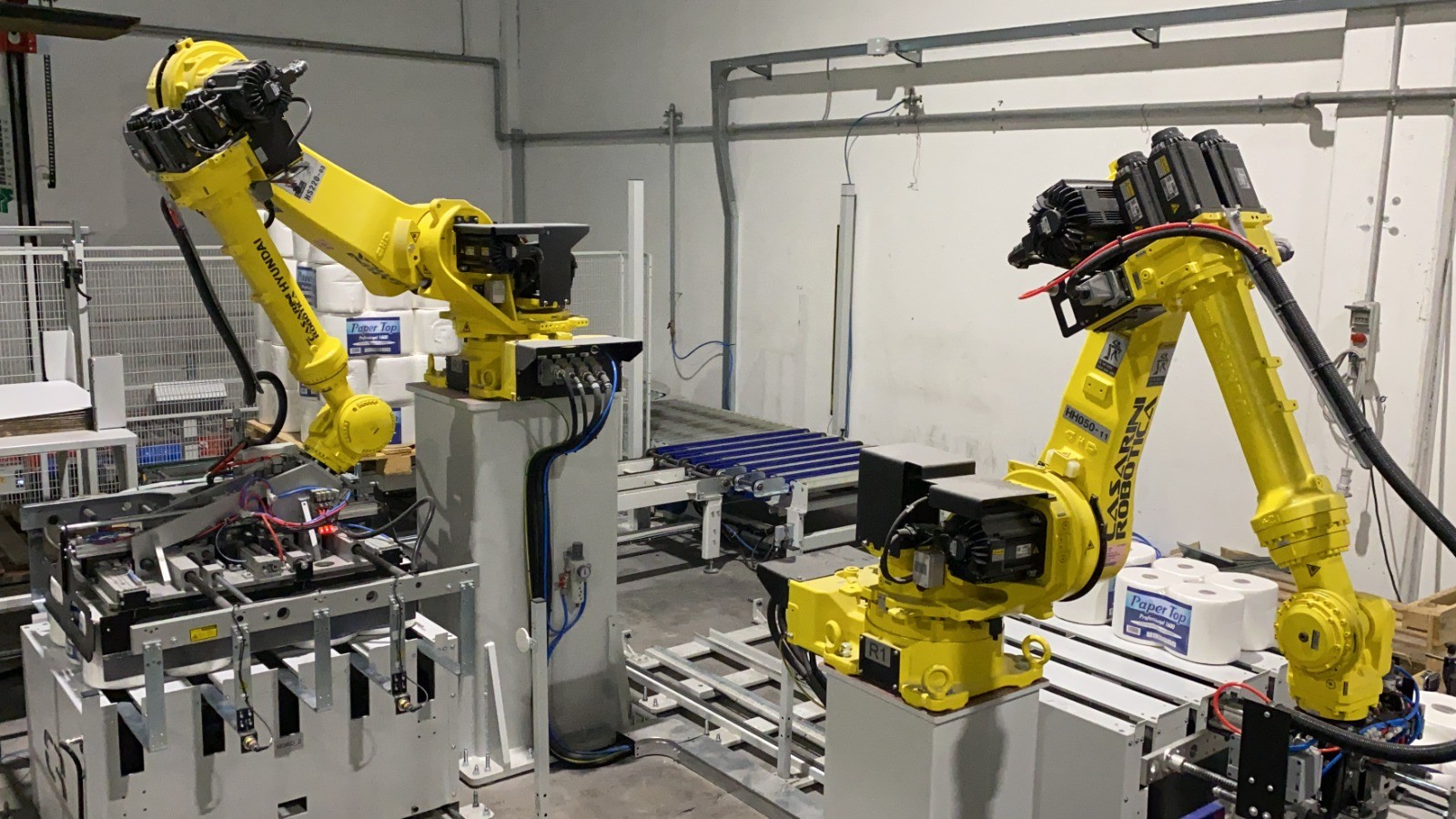
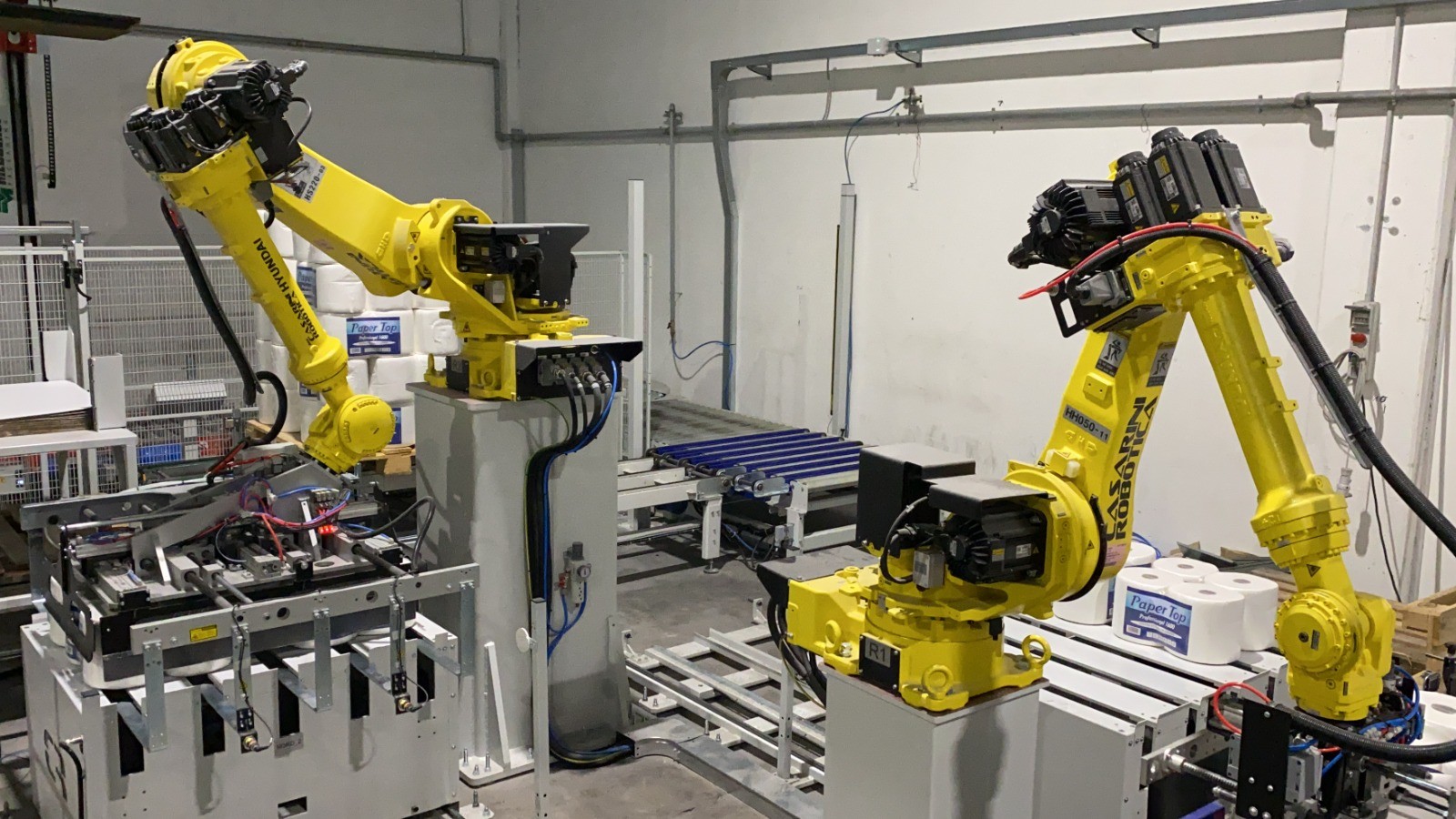
The CASARINI welding robots are mainly used in the welding & cutting industry and fabrication industry. The CASARINI reputation as a specialist for Robotic welding for large-scale projects is based on a steady stream of major contracts from the heavy engineering industry. The robotic systems are utilized amongst others for manufacturing excavators, railway wagons, and locomotives, for boiler making, the construction of gantry cranes as well as for bridge construction and shipbuilding.
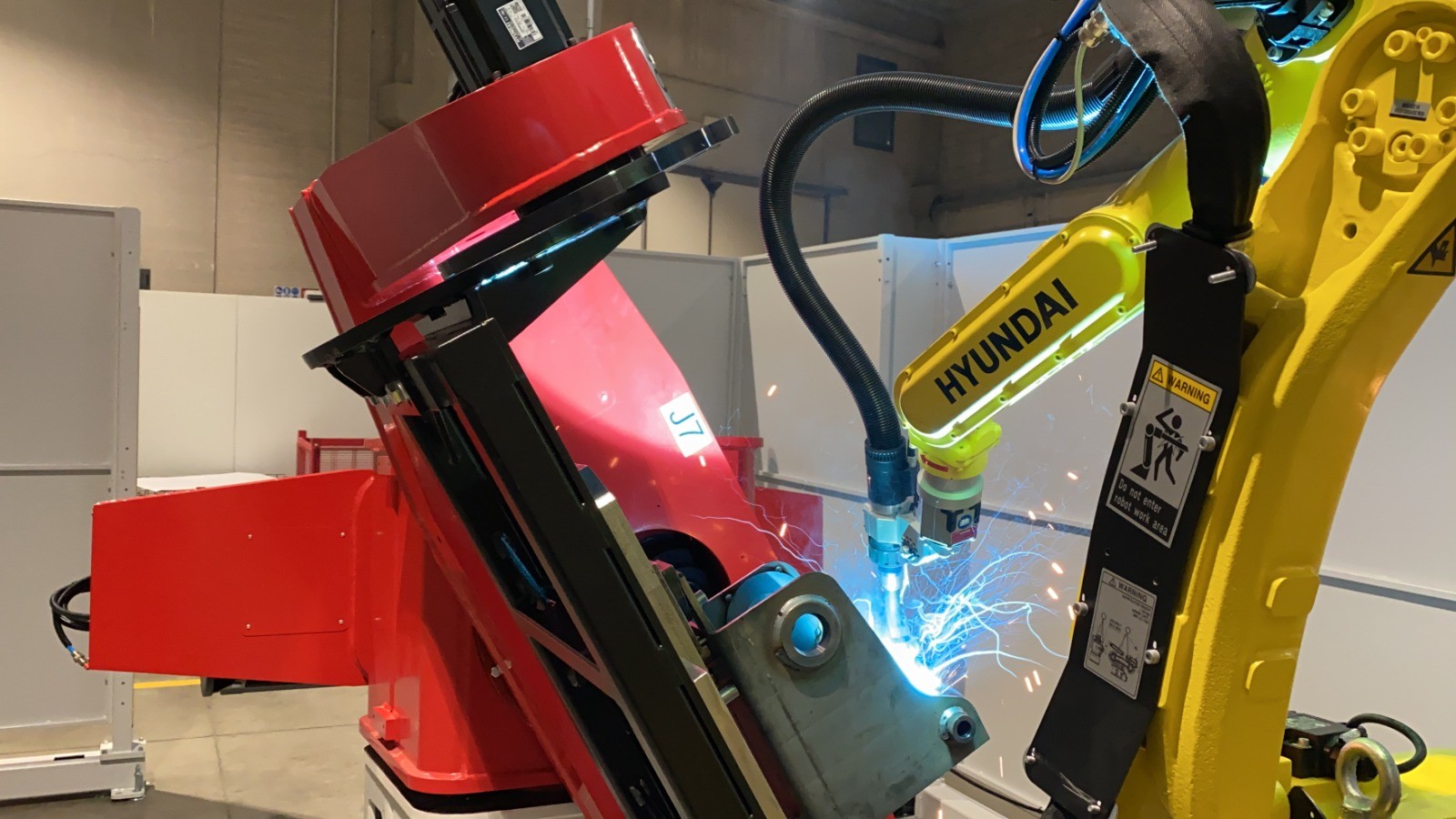
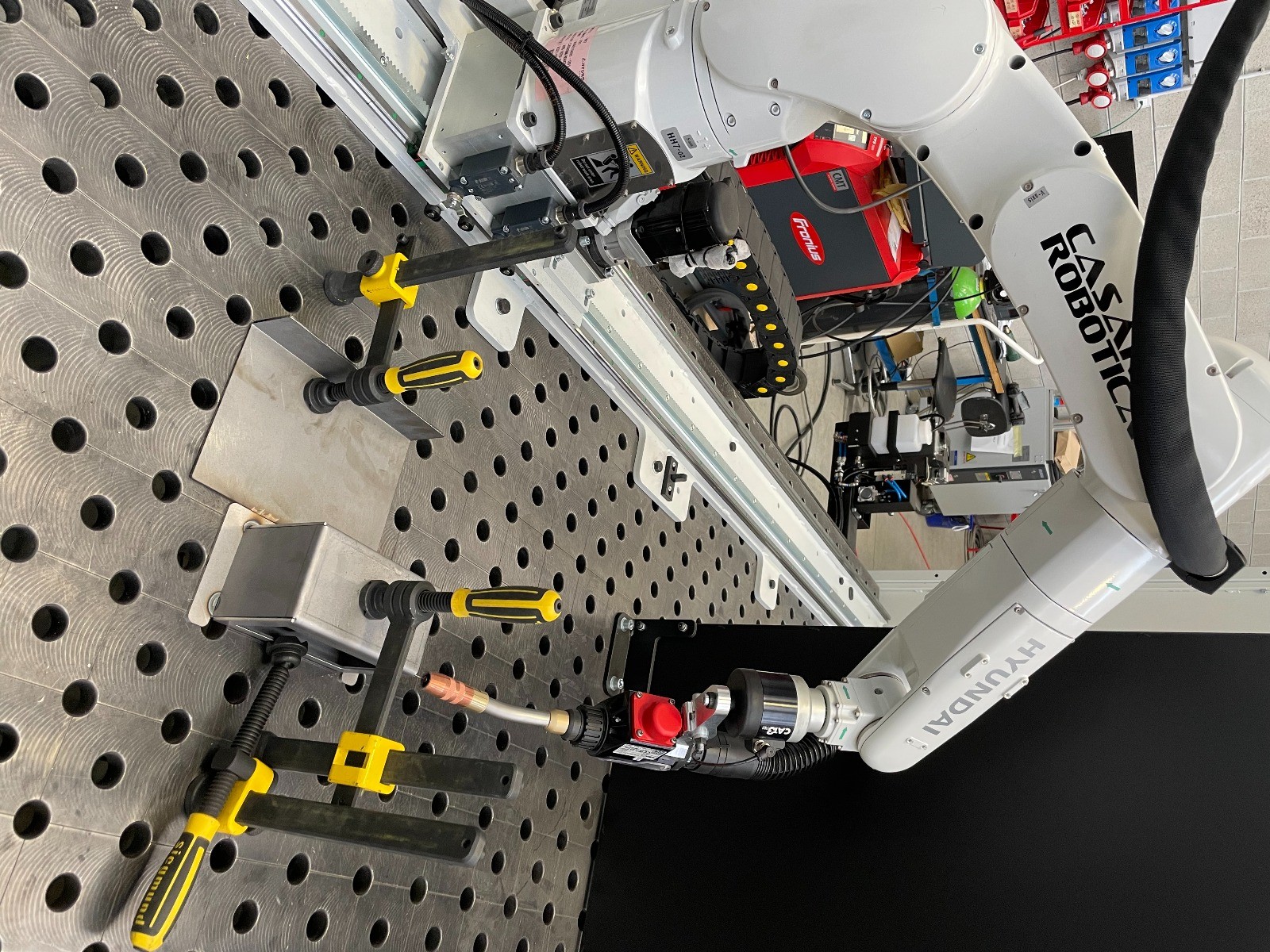
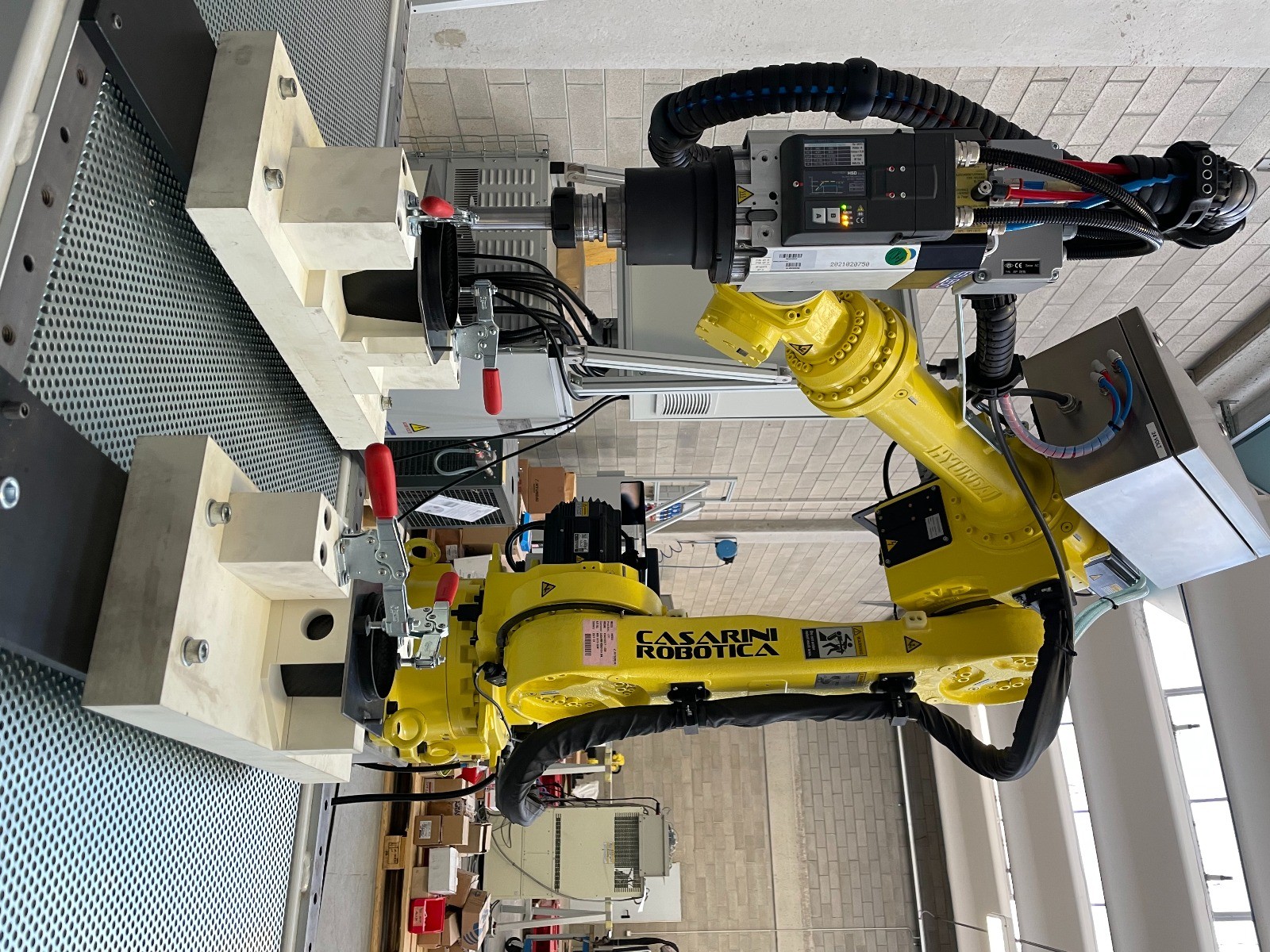
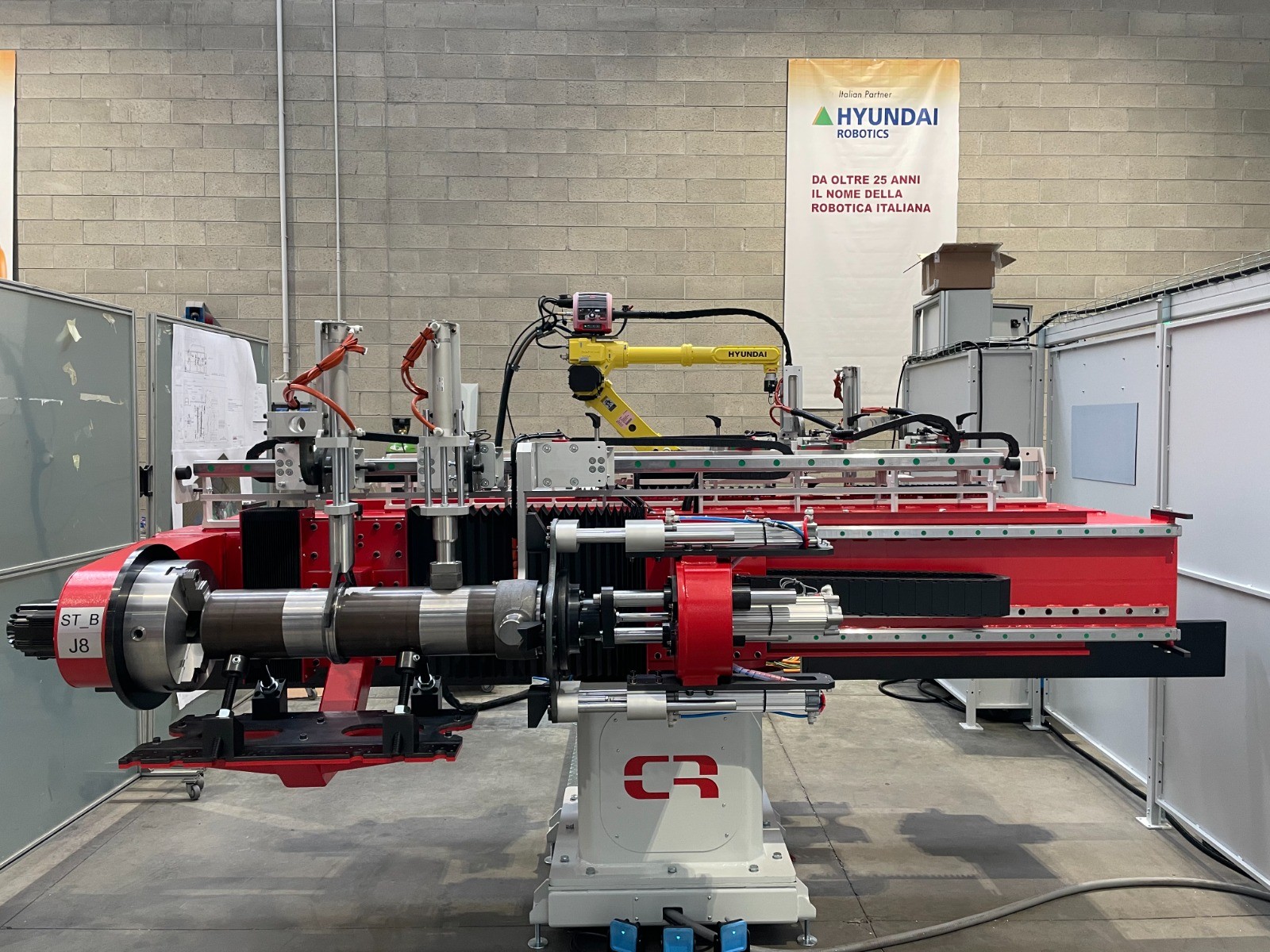
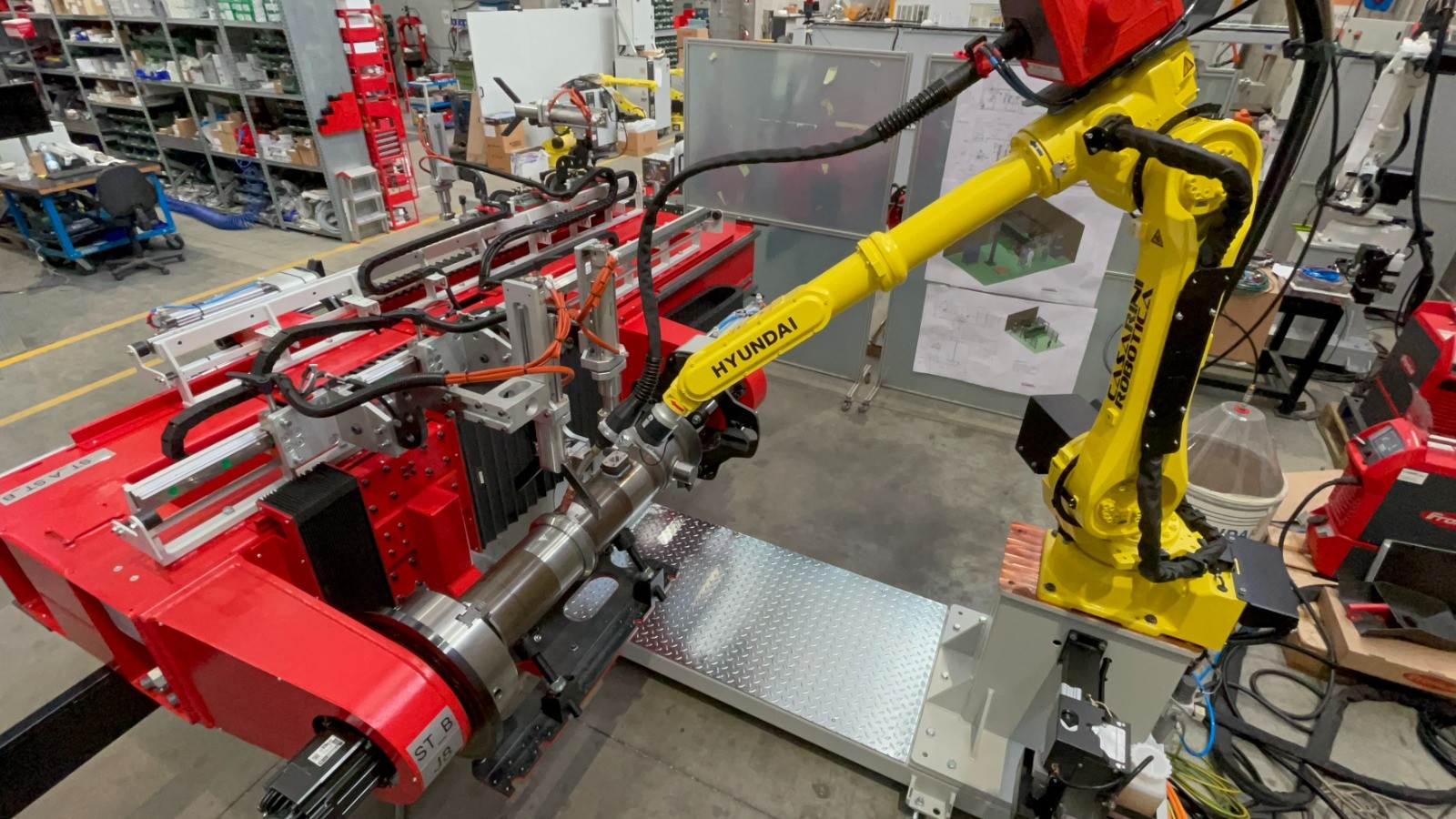
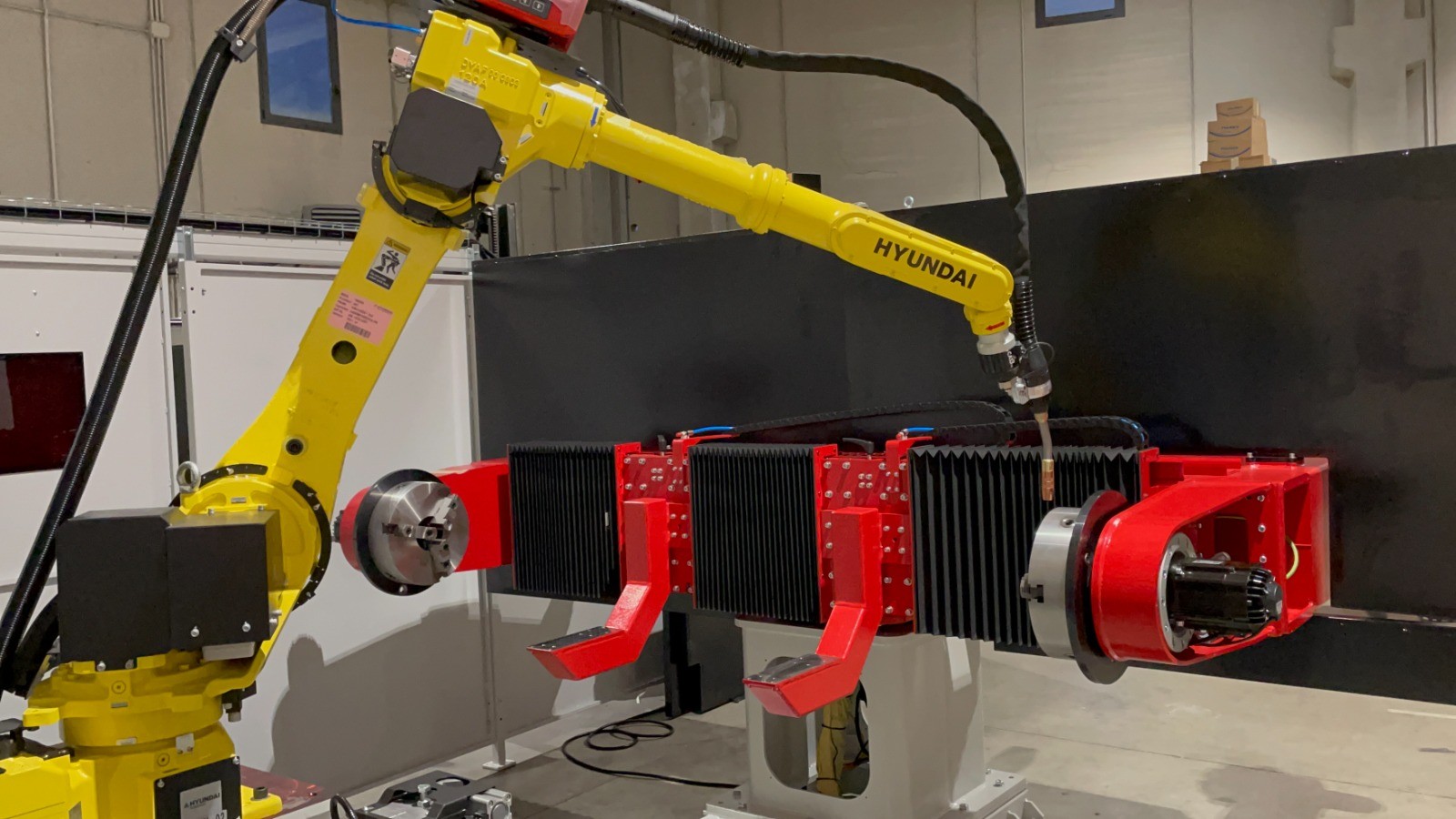
More than years of experience in the development of welding robots and planning of production plants appear in an extensive range of system modules. The main module is the CASARINI Robot series Hyundai HX600
Benefits, typical for CASARINI robots:
Outstanding programming techniques.
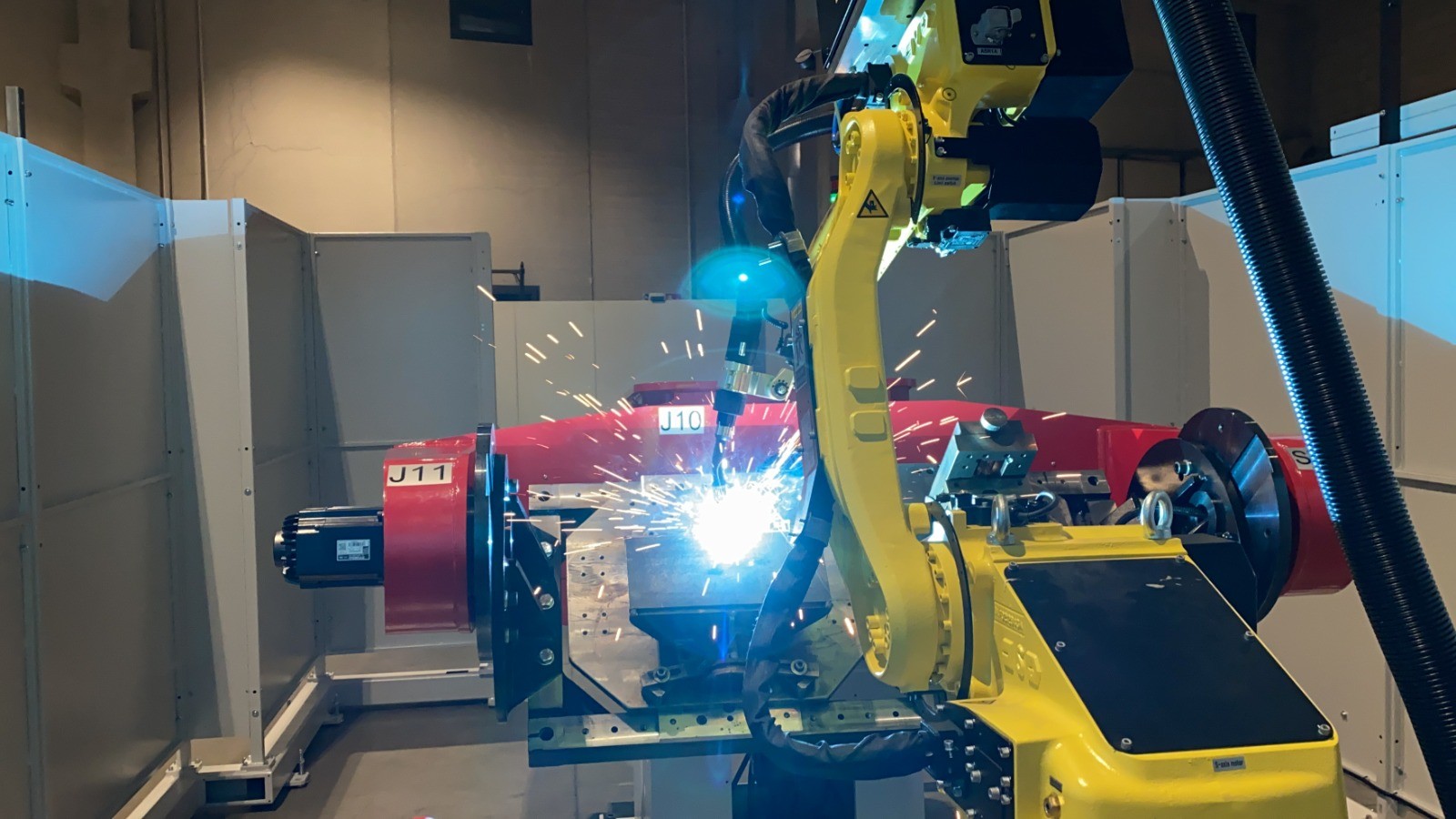
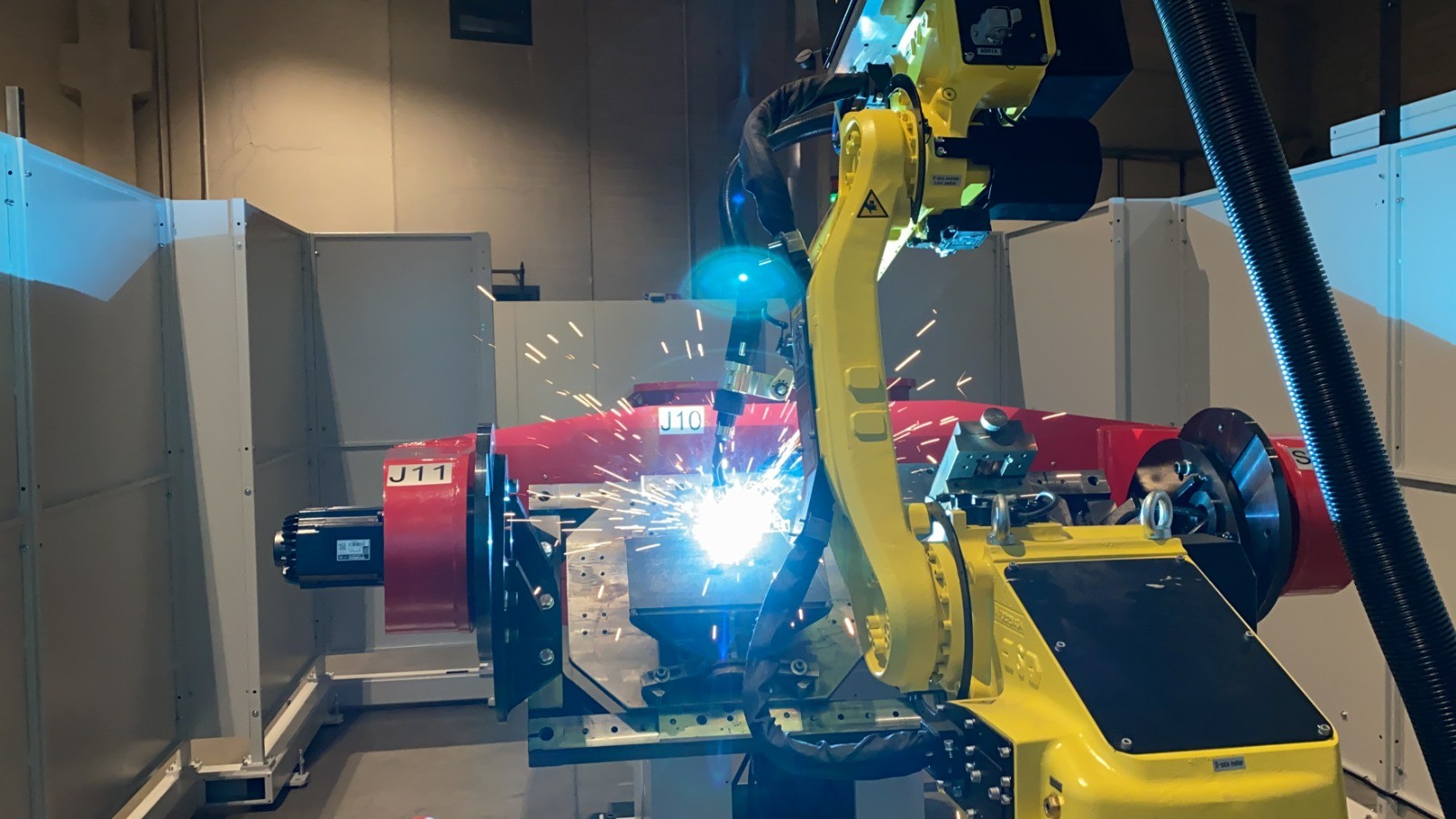
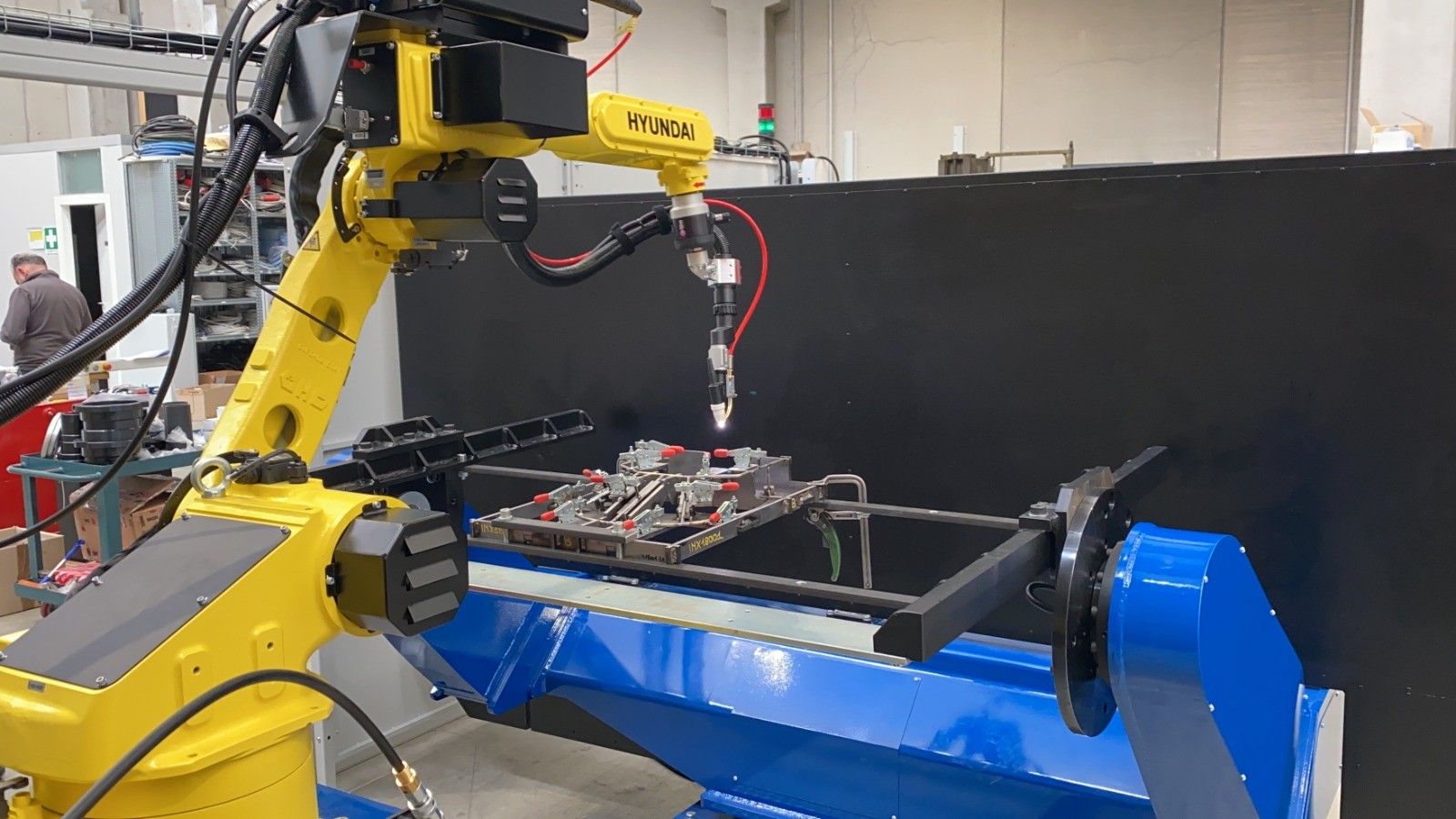
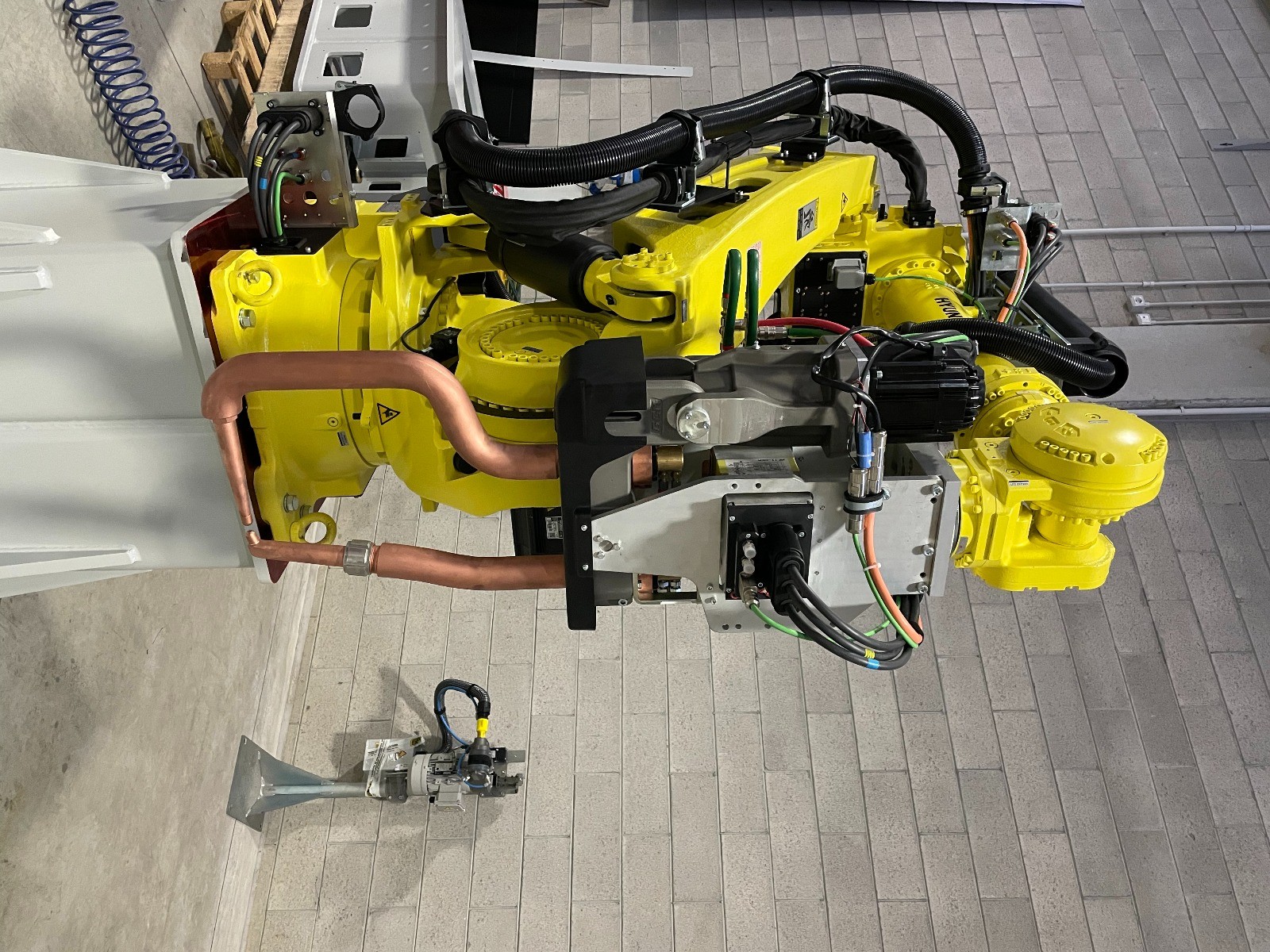
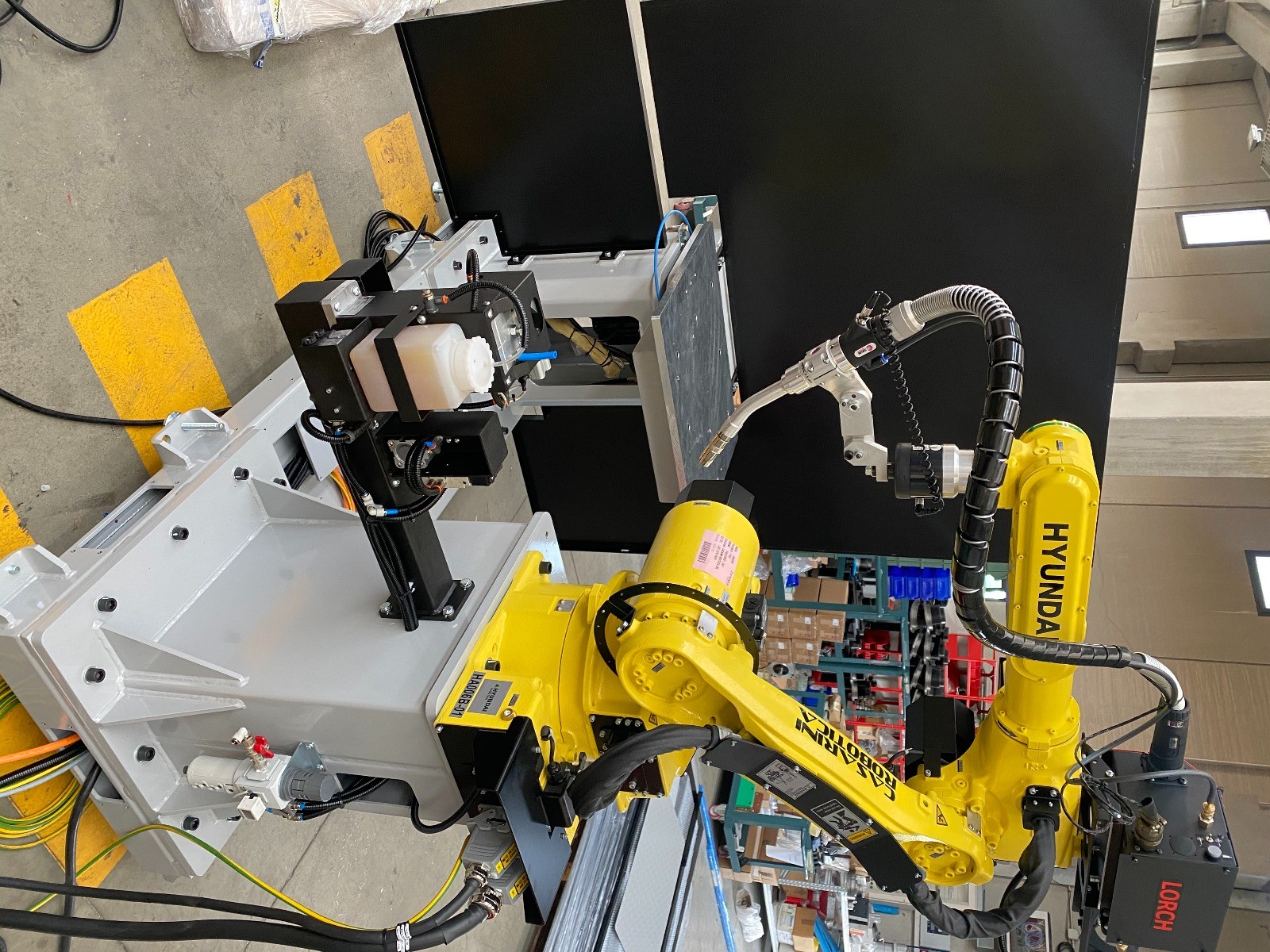
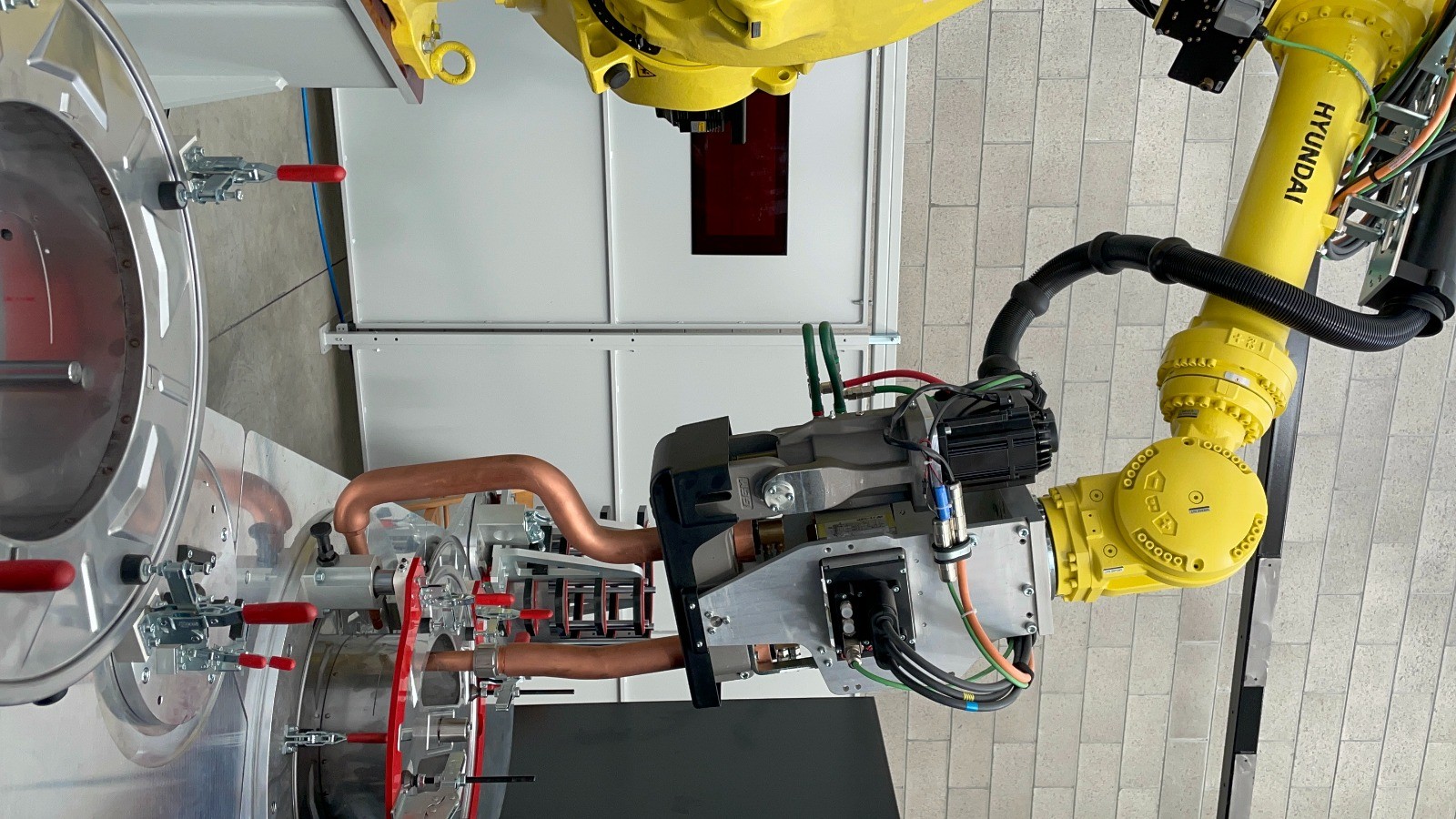
Large work zone and perfect welding access to seam positions due to an optimal axes geometry and mounting of the welding torch in the wrist axis implemented as a hollow shaft.
All cables are inside the robot arms using hollow shafts
The control system is a fully digital controlled system. This means there are only digital signal processors (DSP) involved in the entire control system and not any analog electronic component. All the components of the control system (such as the control cabinet, welding power source, each axis, and the teach pendant) are linked by a digital bus system.
Operational availability of the robot installation for production is increased by using an off-line system for generating robot programs. While saving time, programs may be prepared more conveniently in an office environment and simulation test runs (accessibility, computation of cycle time) may be performed. Collisions of the robot with the workpiece or fixtures may be detected at an early stage.
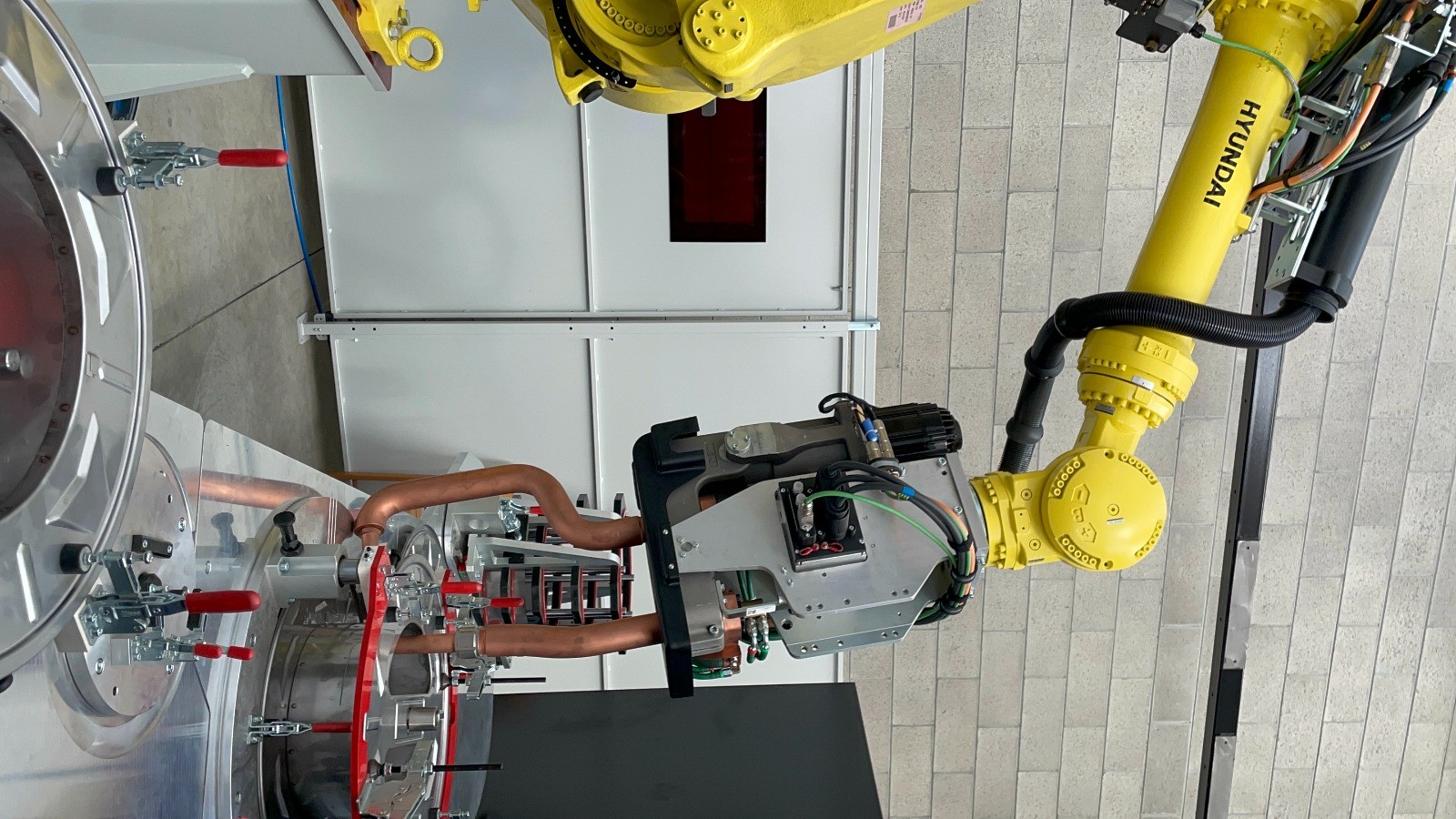
This tactile sensor is used to determine the workpiece position or its components and individual parts by gauging the surface of the workpiece. In each case, the successional part of the program is shifted according to determined deviations.
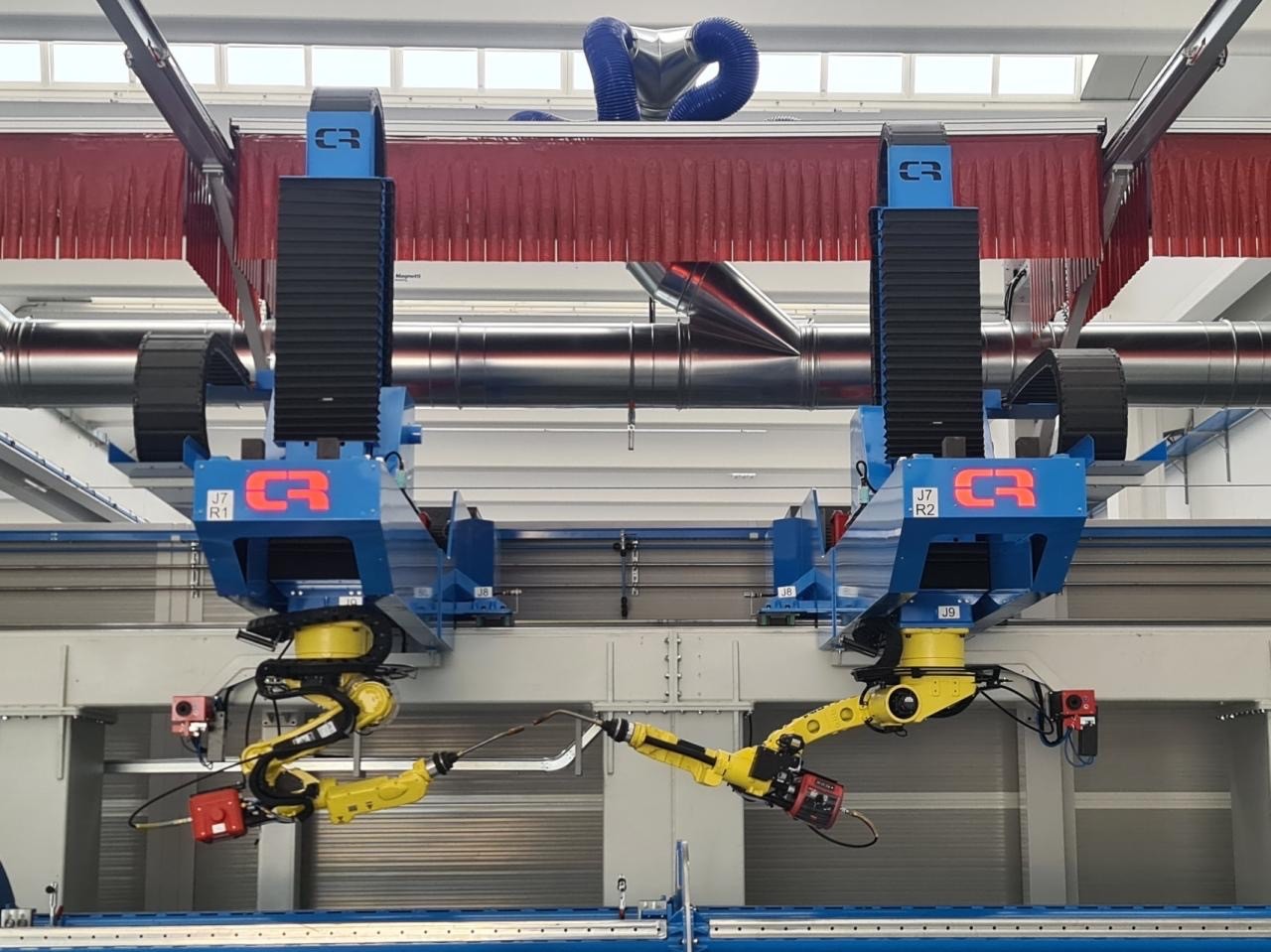
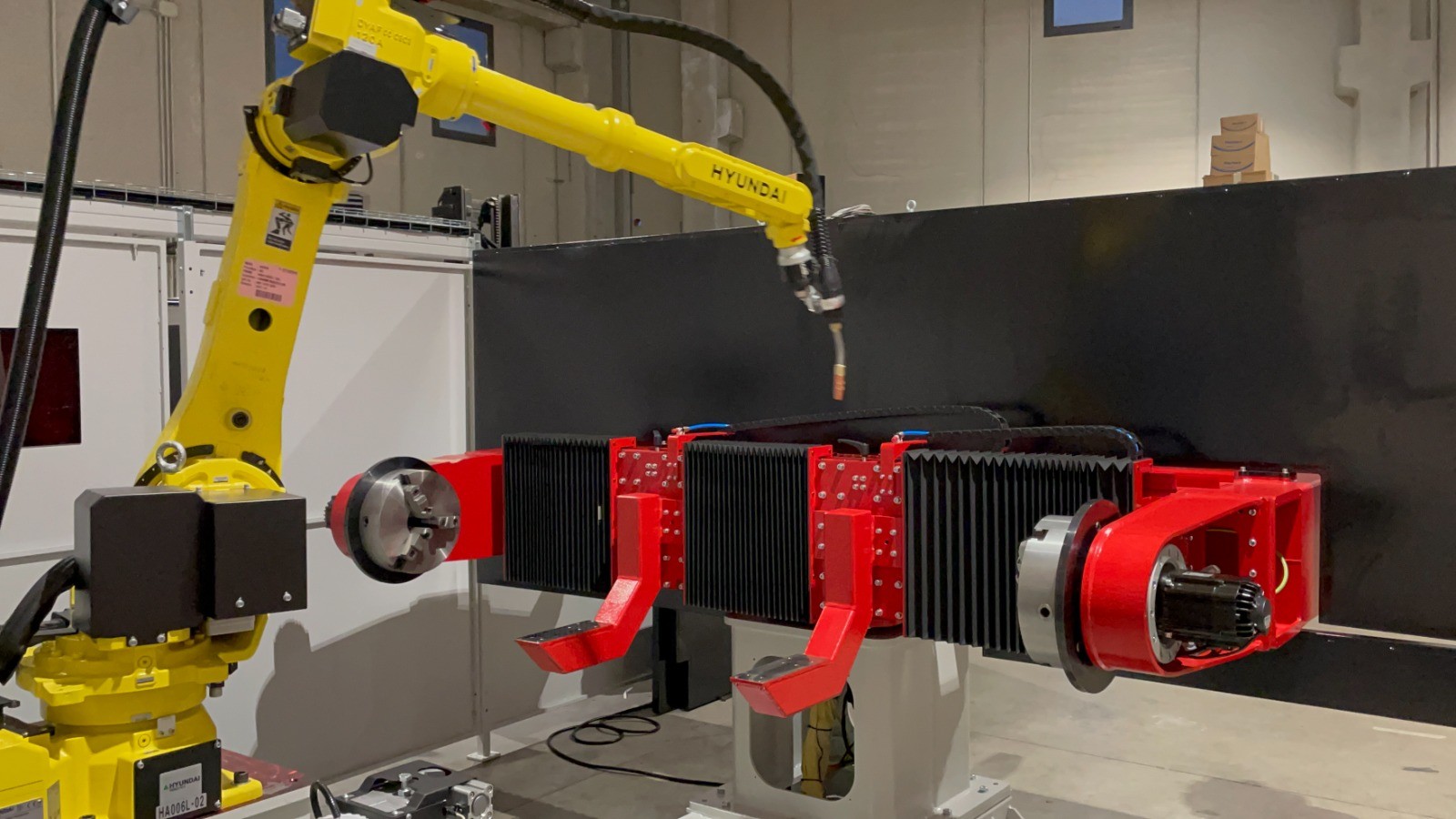
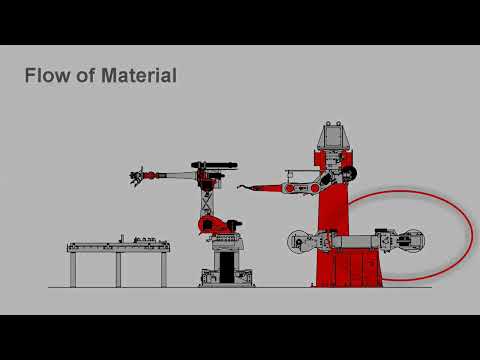
The robot is mounted on the robot periphery in an upright or suspended position. The external axes of the track systems are fully integrated into the control system as NC axes, significantly extending the working area of the robot.